Online multi-target tracking with strong and weak detections
Published in Proc. of 2nd Workshop on Benchmarking Multi-target Tracking: MOTChallenge 2016, Amsterdam, October 9, 2016
Recommended citation: R. Sanchez-Matilla, F. Poiesi and A. Cavallaro. "Online multi-target tracking with strong and weak detection." Proc. of 2nd Workshop on Benchmarking Multi-target Tracking: MOTChallenge.
Abstract We propose an online multi-target tracker that exploits both high- and low-confidence target detections in a Probability Hypothesis Density Particle Filter framework. High-confidence (strong) detections are used for label propagation and target initialization. Low-confidence (weak) detections only support the propagation of labels, i.e.~tracking existing targets. Moreover, we perform data association just after the prediction stage thus avoiding the need for computationally expensive labeling procedures such as clustering. Finally, we perform sampling by considering the perspective distortion in the target observations. The tracker runs on average at 12 frames per second. Results show that our method outperforms alternative online trackers on the Multiple Object Tracking 2016 and 2015 benchmark datasets in terms tracking accuracy, false negatives and speed.
Sample image 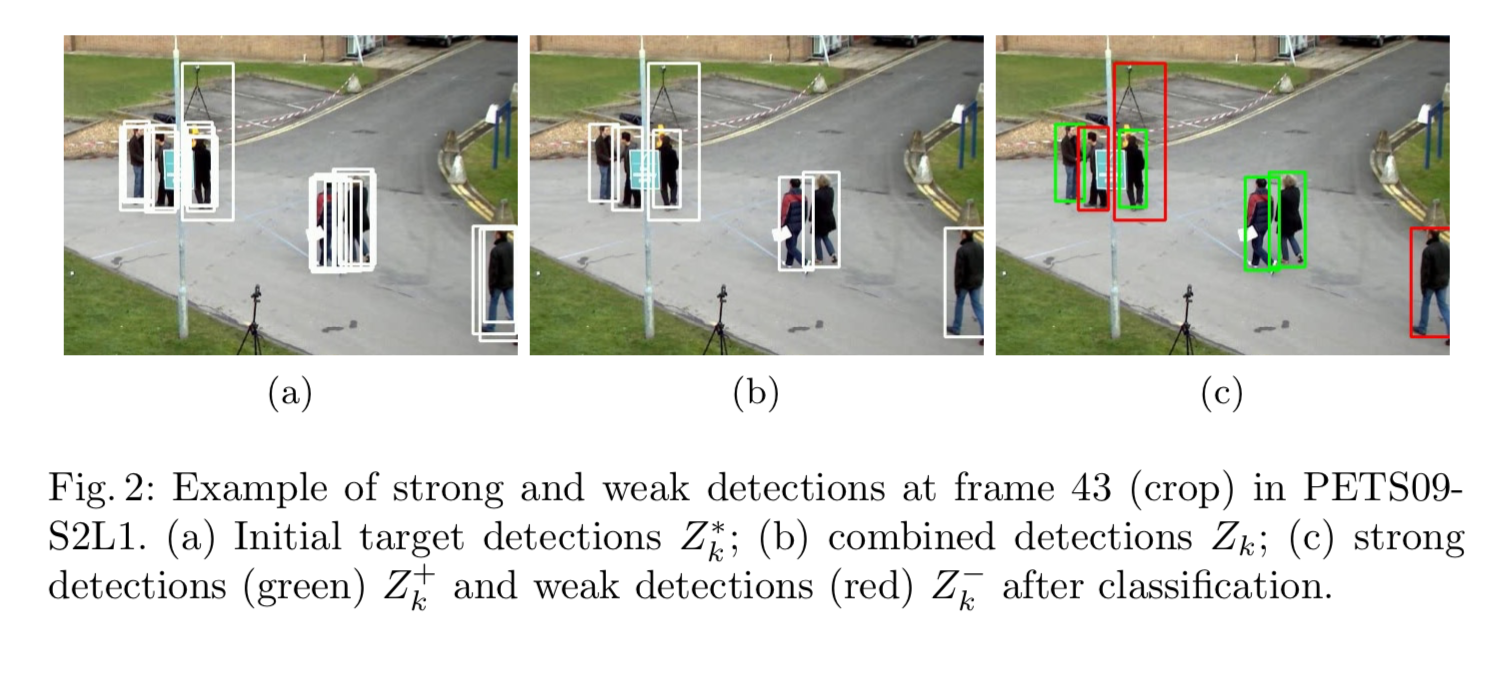
Links Paper Presentation