Towards Robust Sensing for Autonomous Vehicles
Published in IEEE Transactions on Signal Processing Magazine (SPM): Special Issue on Autonomous Driving - To Appear, 2019, 2019
Recommended citation: Apostolos Modas*, Ricardo Sanchez-Matilla*, Pascal Frossard, and Andrea Cavallaro. "Benchmark for Human-to-Robot Handovers of Unseen Containers with Unknown Filling." IEEE Transactions on Signal Processing Magazine (SPM): Special Issue on Autonomous Driving.
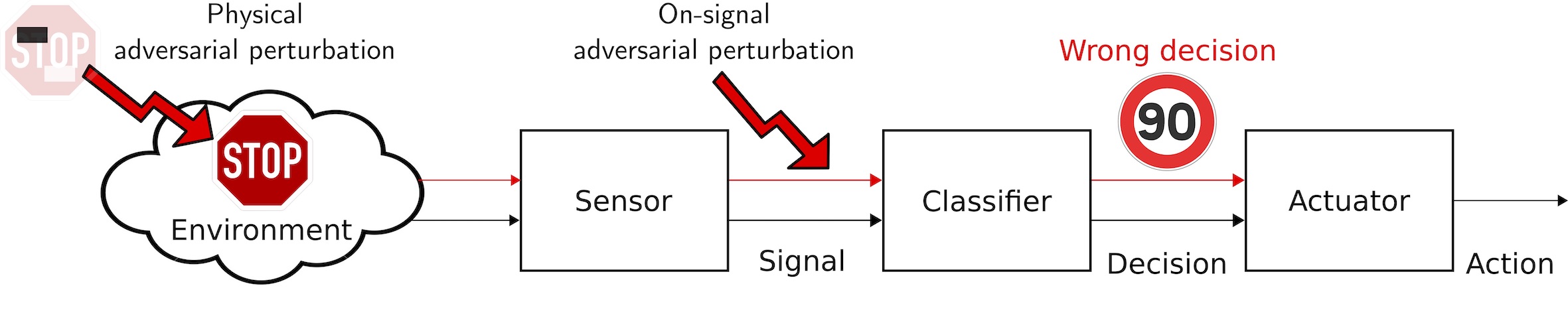
Abstract Autonomous vehicles rely on accurate and robust sensor observations for safety critical decision-making in a variety of conditions. Fundamental blocks for inferences are sensory systems and classifiers that process ultrasound, RADAR, GPS, LiDAR and camera signals. In particular, decisions should be robust to perturbations, which may include purposefully crafted alterations of the environment or of the sensory measurements. These alterations are known as adversarial perturbations.
To build and deploy safer systems in the fast-evolving field of autonomous vehicles, a continuous evaluation of the vulnerabilities of their sensing system(s) is necessary. To this end, in this paper we survey the emerging field of sensing in adversarial settings: after reviewing adversarial attacks on sensing modalities for autonomous systems, we discuss existing countermeasures and present future research directions.
Sample image
Links Paper coming soon