Tracking a moving sound source from a multi-rotor drone
Published in Proc. of IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, October, 1- 5, 2018
Recommended citation: L. Wang, R. Sanchez-Matilla and A. Cavallaro. "Tracking a moving sound source from a multi-rotor drone." Proc. of IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS).
Abstract We propose a method to track from a multi-rotor drone a moving source, such as a human speaker or an emergency whistle, whose sound is mixed with the strong ego-noise generated by rotating motors and propellers. The proposed method is independent of the specific drone and does not need pre-training nor reference signals. We first employ a time-frequency spatial filter to estimate, on short audio segments, the direction of arrival of the moving source and then we track these noisy estimations with a particle filter. We quantitatively evaluate the results using a ground-truth trajectory of the sound source obtained with an on-board camera and compare the performance of the proposed method with baseline solutions.
Sample image 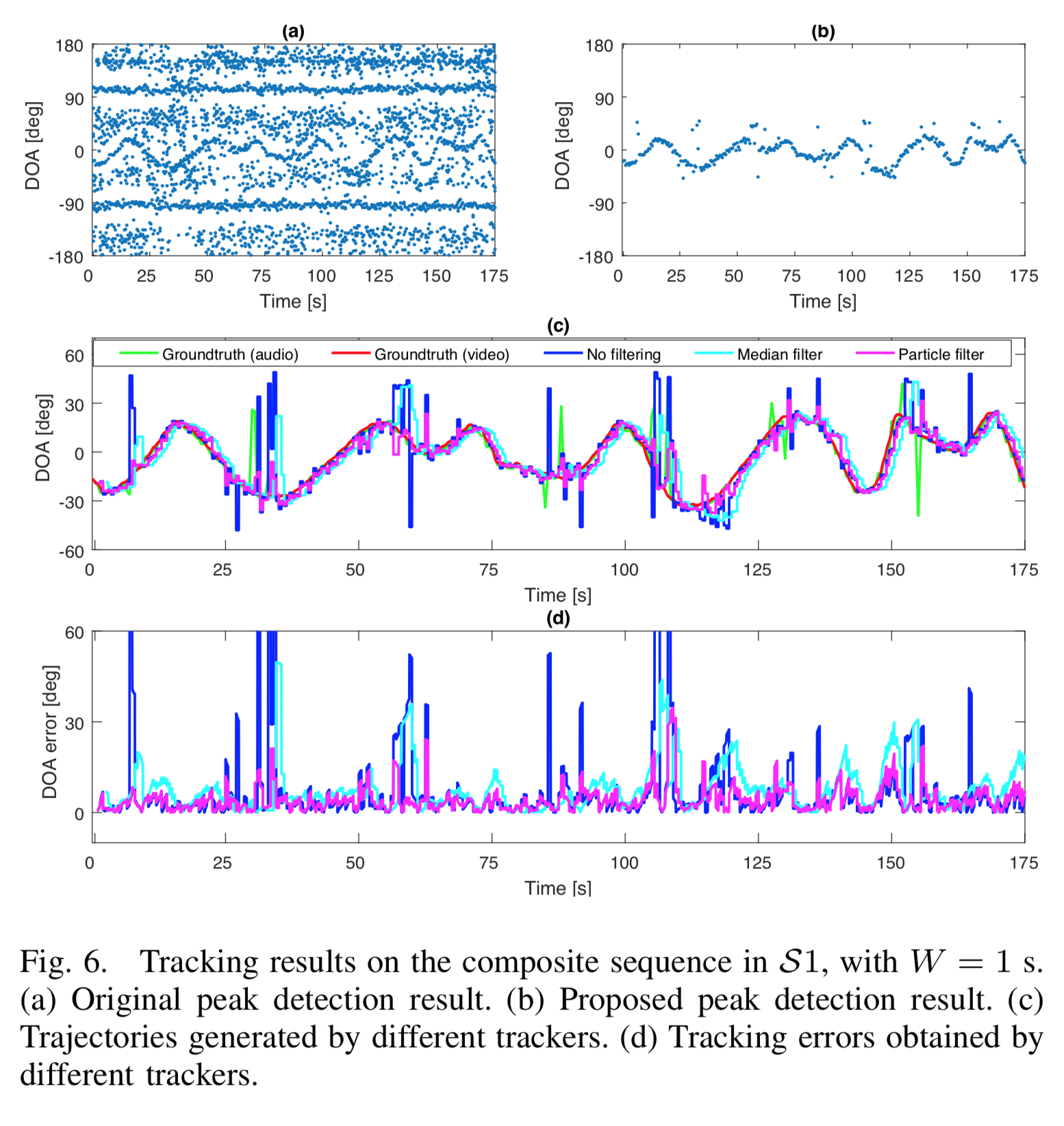
Links Paper Presentation Poster
Video